Configuration – PRS’s Hidden Common Failure
A vessel was conducting ROV operations in the North Sea in open water, and was believed to be configiured as per the ASOG with open bus 2-way split, four thrsters selected into DP control. Position references online were four DGNSS and two Hydro-acustic all selected into DP system Control.
The first event was an alarm for DGNSS 2 & 3 and the subsequent de-selection from DP control, followed by DGNSS 1 & 4 along with Gyro’s 1 & 2. This was followed by the loss of both Hydro-acoustic position reference to DP control, the vessel was now positioning based on the model.
The ROV was ordered back to the tether management system and the yellow DP alert was activated.
Sea state was around 4 meters wave height and northerly wind on the bow of the vessel. Potential risk of fast drift-off position was high. Ship’s crane wire was subsea but not connected to the subsea asset. The ROV was clear of any seabed structure.
Fortunately, no property, environment or other damage occured.
Causal Factors:
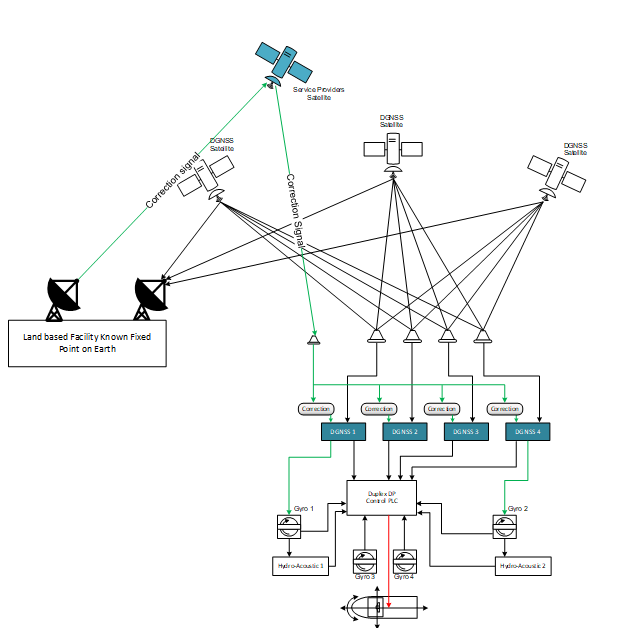
Below is a list of step causes that together led to the incident highlighted above, Figure 3 below shows how the DGNSS was configured prior to failure:
- The correction signal suppliers satalite signal was reported as failed for 1hr 3mins.
- All four of the DGNSS modulators (signal correction modules) were locked onto a single source.
- Failure of the single correction source led to the loss of DGNSS and prompted the DP Control to reject all four DGNSS PRSs.
- Both Gyros 1 & 2 took automatic updates from the DGNSS for latitude & speed correction.
- This is not recommended, it is recommended that manual input be used. Reference: IMCA M 252 Section 4.6 Operational Consideration Summary
- Upon loss of the DGNSS signal into the Gyro, the settings in the Gyro were such that it failed all output signals. If automatic speed and latitude correction is used then the settings need to be configured in such a way that they fail safe, i.e., the output signal is not lost.
- Upon failure of both Gyro’s 1&2 both Hydro-acoustic PRS units were subsequently rejected from DP Control.
- During the calibration by the Survey team, both Hydro-acoustic systems were connected to Gyros 1 & 2 with auto speed and latitude, instead of Gyro’s 3 & 4 with manual speed and latitude setting. In this way, after satellite primary reference loss, it additionally resulted in the loss of the Hydro-acoustic position references.
- After the calibration and change of configuration there was no written note, handover or verbal notice given by the involved personnel who were present during calibration. This meant that at the moment of the DP incident the watch keeping DPOs were not aware about such critical system changes and reason for the loss of Hydro-acoustic PRSs.
- A common mode failure had been introduced.
The Lessons
The following lessons can be taken from this incident:
1 For the Hydro-acoustic calibration, the configuration was altered and did not appear to be documented and, as such, was not returned to the fault tolerant configuration.
2 Not all stake holders were party to the fact that the calibration required a configuration change – in this case the DPOs were not informed.
3 Check lists did not capture the fact that only one common correction was being used and that the settings for DP Control would reject DGNSS on loss of correction signal (Raw data usage is an option for some DP Control systems). The DGNSS topology needs to be clearly displayed and understood and this can be an area where people instinctively shy away from, due to its perceived complexity.
4 The gyros in question were configured in such a way that upon loss of DGNSS latitude and speed signal the gyro output failed, this is dependant upon settings within the Gyro unit.
5 It is not recommended that the Gyros take an automatic latitude & speed signal, it is recommended for DP vessels that latitude & speed be entered manually – Reference: IMCA M 252 4.6 Operational Consideration Summary. Also see NOTE below.
NOTE – Effects of Incorrect Latitude and / or Speed Inputs
If the operator or the GPS inputs an incorrect value for latitude or (more significantly) speed, then the Gyro compass will apply an incorrect adjustment to the output heading information. The magnitude of the error will vary with the inaccuracy of the input latitude or speed but an error of 10º or 5 knots may cause an error of 0.5º in the output heading.
When latitude and speed input is manually adjusted by the operator it is reasonably unlikely that large enough errors could be introduced to cause a significant error in the output heading. However, now that there is a trend towards using GPS to provide the latitude and speed information, there is the possibility that sudden GPS jumps (that used to plague DP systems in the early days of using GPS as a position reference) can introduce very large and sudden changes in latitude and therefore, calculated speed.
DP Event
Published: 13 December 2021
Download: ![]() IMCA DPE 04/21
IMCA DPE 04/21
Submit a Report
The following case studies and observations have been compiled from information received by IMCA. All vessel, client, and operational data has been removed from the narrative to ensure anonymity.
Case studies are not intended as guidance on the safe conduct of operations, but rather to assist vessel managers, DP operators and DP technical crew in appropriately determining how to safely conduct their own operations. Any queries should be directed to IMCA at [email protected]. Members and non-members alike are welcome to contact IMCA if they have experienced DP events which can be shared anonymously with the DP industry.
IMCA’s store terms and conditions (https://www.imca-int.com/legal-notices/terms/) apply to all downloads from IMCA’s website, including this document.
IMCA makes every effort to ensure the accuracy and reliability of the data contained in the documents it publishes, but IMCA shall not be liable for any guidance and/or recommendation and/or statement herein contained. The information contained in this document does not fulfil or replace any individual’s or Member's legal, regulatory or other duties or obligations in respect of their operations. Individuals and Members remain solely responsible for the safe, lawful and proper conduct of their operations.